Research
태그를 클릭해 관련 연구를 확인해보세요.
전체 -개의 연구 결과
Real-time VLM Optimization for E2E Autonomous Driving
- Vision-Language Model- End-to-End Framework- Model Quantization
Vision Language Action based E2E AD
- Vision-Language Model- Reasoning-Action Align- End-to-End Framework
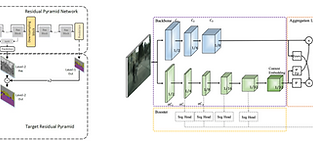
Online Map Prediction
- HD Map construction- Real-time Mapping- End-to-End Framework
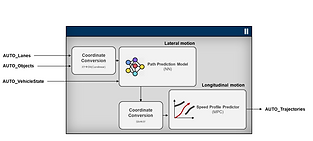
Mid-to-Mid Model for Urban Autonomous Driving
- Trajectory Planning- Mid-to-Mid Planning- Real-World Validation
Requirement Engineering for Autonomous Driving System
- Requirement Engineering
End-to-End Autonomous Driving
- End-to-End AD- Knowledge Distillation- Lane-set Priors
- End-to-End System- Autonomous Driving- Real World Dataset
Polarization Camera based Road Surface Recognition
- Road Condition Estimation- Dataset generation- Polarization Image
RL for Autonomous Driving
- Mid-to-Mid Planning- Imitation Learning- Reinforcement Learning
Continual Learning for Imitation Learning
- Data Aggregation- Continual Learning
Trajectory Post-processing Development
- Trajectory Refinement- Risk-based Verification
Radar-Only Odometry using 4D Imaging Radar
- 4D Imaging Radar- Radar Odometry- Voxel Map
Mid-to-Mid Model Evaluation Platform
- Trajectory Planning- Mid-to-Mid Planning
Development of Optimization Strategies for Implementing Driving Personalities in Autonomous Vehicle Motion Control
- Model Predictive Control- Human Tailored Driving- Optimization
Autonomous Driving in Off-Road Environment
- Traversability- Trajectory Planning- Off Road
Mid-to-Mid Model based on Sampling Method
Open Multi-Middleware SW Platform for Autonomous Driving
- Multi-Middleware- ROS2- Adaptive AUTOSAR
Digital twin-based vehicle controller development and evaluation
- Vehicle control- MPC- Digital twin
Auto-tuning RL for Tracking Controller
- Controller Tuning- Global Optimization- Model Predictive Control
Hybrid Trajectory Planning for Autonomous Racing
- Planning- Autonomous Racing
Fisheye Camera Online Panoptic Segmentation
- Sensor Fusion- Multi-modality- Panoptic segmentation
SLAM SW Platform for Level 4 AD
- Landmark Map- Graph SLAM- Covariance Estimation- Localization Integrity
HD Map Validation AI for Robust Localization
- Precise Map Based Local Route- Perception Based Local Route- Autonomous Vehicle
ROS2 middleware-based application for APU
- ROS2 middleware- SOME/IP- Vehicle control- APU(VPC-P)
Crowd Sourced Map Data
- Crowd Sourced Map- Heatmap
Optimization-based Trajectory Planning
- Trajectory planning- Optimization- Trajectory validation- Replanning decision
Optimization-based trajectory planning and digital twin-based verification
- Trajectory planning- Optimization- Trajectory validation
Fisheye Camera Online Semantic Segmentation
- Fisheye Camera - Online, Real-time - Semantic Segmentation
High-definition (HD) Map Building based on Autonomous Cars
- HD map- LiDAR SLAM- Feature segmentation
Graph-based Multi-sensor Extrinsic Calibration
- Sensor Calibration- Graph-based Pose Estimation
Object Detection & Tracking using 4D Imaging Radar
- Object Tracking- 4D Imaging Radar- Lane-aided Tracking
Point Cloud Panoptic Segmentation based on LiDAR-Camera Fusion
RCS-weighted Map Matching Localization using 4D Imaging Radar
- Radar cross section- Map Matching Localization- 4D imaging radar
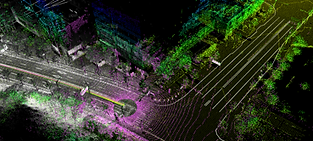
Adverse Weather Data Augmentation of LiDAR
- Data augmentation- Semantic segmentation- Adverse weather data
Sensor Fusion Utilizing Semantic Data To Improve Recognition (II)
- Multi-sensor fusion- Object classification- Calibration
LiDAR-based Road Surface Condition Classification
- Road condition estimation- Network optimization & deployment
LiDAR-Video Fusion for AGV
- Synchronization- Calibration- Sensor fusion
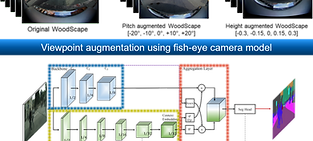
Fish-eye Camera Dataset Augmentation
- Fisheye Camera - Domain adaptation- Semantic Segmentation
Simultaneous Localization and Calibration using LiDAR
- Road Surface Mapping- Lidar Mapping- Road Surface Profile
Sensor Fusion Utilizing Semantic Data To Improve Recognition (I)
- Sensor Fusion- Multi-modality- Semantic segmentation
Automatic Headlamp leveling based on IMU
- State Estimation- Dead-reckoning- Head-lamp auto Leveling
Interaction-aware motion prediction of surrounding vehicles
- Motion Prediction- Deep-learning- Graph Neural Network
Autonomous driving verification in 5G-based cloud-vehicular edge
- Vehicle- to-everything (V2X)- Cloud-vehicle edge environment- Optimization
Road Surface LiDAR SLAM for Preview Suspension
- LiDAR- Local Point Cloud Mapping- Point Cloud Semantic Segmentation
Demonstration of self-driving valet parking service using real-time parking space information
- Automatic Parking- Parking Space Detection- Parking Control Algorithm- 5G
- SLAM- HD Map- Object Motion Prediction- Machine Learning
Hierarchical motion prediction for highway scenarios
- Motion prediction- Dynamic scenario
Cloud SLAM for Level 4 AD
Highway overtake decision for autonomous driving
- Motion planning- Machine learning- Dynamic scenario
Automatic weight tuning for personalized car-following control
- Motion control- Personal driving- MPC
Dataset for Semantic Global Point Cloud Map
- Map Matching- HD Map- Motion Estimation
Development of map matching algorithm robust to the matching errors between HD map and perception
LiDAR Point Cloud Semantic Segmentation