Graph-based Multi-sensor Extrinsic Calibration
- Sensor Calibration
- Graph-based Pose Estimation
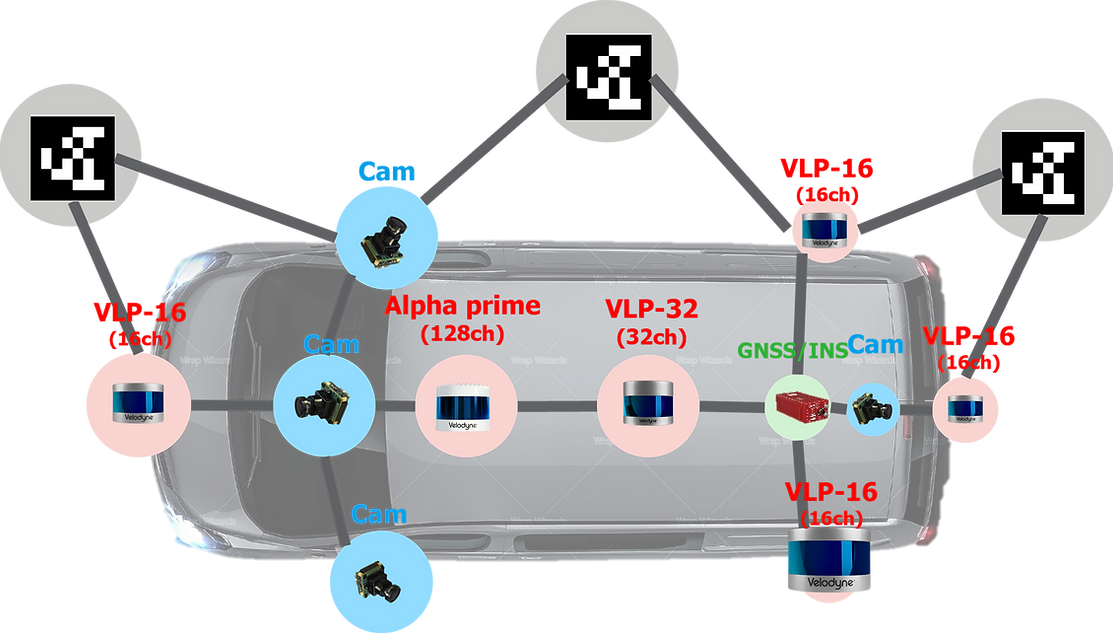
- Calibration of various types of sensors
- Calibrate camera, LiDAR, and vehicle at once
- Pose graph construction between markers and sensors using an external camera